Understand How Robotics Manufacturing Works and Its Advantages

Robotics have been about for decades and has progressed ever since. It is considered a breakthrough innovation for the manufacturing industries. Robotics in manufacturing increases productivity, quality, speed, accuracy, and safety. In short, it gives the manufacturer a competitive edge.
Robots are employed in manufacturing to do repetitive activities, streamlining the workflow of the entire assembly process. Robots and humans work together to produce products. A robot can carry out various dangerous tasks, such as inspecting and cleaning storage tanks or handling large quantities of products that could endanger human workers.
Common Industrial Robot Applications Include:
Common industrial robot applications include:
– Material Transfer: These are uses where the robot’s main objective is to transport materials from one place to another. Palletizing is a complicated material transfer in which a robot gathers components, cartons, or other items from one location and deposits them at various locations on a pallet or other container.
– Machine loading and unloading: The robot transfers parts into and out of a production machine when loading and unloading machines. The following steps are included in machine loading and unloading:
- 1. Die casting: The robot unloads parts from the die casting machine.
- 2. Plastic molding: The robot unloads molded parts from the injection molding machine.
- 3. Metal machining operations: The robot’s machine tool is loaded with raw blanks, which removes finished components.
- 4. Press working: To lessen the risk, robots are employed to replace workers. In the most basic uses, a robot inserts a blank into a press, performs a stamping operation, and then the part discharges into a container.
– Welding: welding robots are commonly used for the welding process that requires high accuracy and speed. Welding robots improve cycle speed, produce better weld quality, and cut labor costs. Robot welding also ensures a safe work environment for workers. Exposure to arc burns, overspray, or inhaling hazardous smoke is eliminated with welding robots. Welding robots are commonly used for spot welding and arc welding is the two types of welding.
– Spray coating: spray coating of automobile car bodies, appliances, engines, and other parts; spray staining of wood products; and spraying porcelain coatings on bathroom fixtures.
– Other processing operations where the robot is used are:
- 1. Drilling, routing, and other machining processes.
- 2. Grinding, wire brushing, and similar operations.
- 4. Laser cutting.
– Assembly: combines two or more parts to form a new entity, called a subassembly or assembly. They are used in industries that demand accuracy and cleanliness, such as pharmaceuticals, electronics, etc. Assembling robots lower operational expenses since they work without employees and streamline routine tasks. Electric motors, compact appliances, and several other small mechanical and electrical devices are examples of this type of product.
– Inspection: The following goals are achieved by inspections:
- 1. Ensuring that a specific process has been finished.
- 2. confirming that the pieces have been put together according to the instructions.
- 3. locating defects in components, both finished and raw.
– Collaborative Task: In collaborative robots, people and robots cooperate to complete a task. They work together, combining the advantages of the human worker and the robot (accuracy, repeatability, speed, lifting capacity, and tirelessness) (intelligence, adaptability, and problem-solving ability)

How Do Robots Work
A robot’s total number of axes is frequently used to categorize robots. The robot’s joint or axis allows relative mobility between two body parts. Two links, the input and output links, are connected to each joint. The robot manipulator’s rigid parts are the links.
The robot’s axis and joints are essential to its operation. Five different types of joints allow for controlled movement of the input link’s output link: linear, orthogonal, rotational, twisting, and revolving joints.
Types of Industrial Robots
Based on the configuration of axis and joints, there are five types of robots used for industrial applications:
1. Robot with jointed arms is also known as an articulated robot. Its general shape resembles that of a human shoulder and arm.
2. Polar configuration wherein the sliding arm can rotate between a vertical and a horizontal axis.
3. Selectively Compliant Arm for Robotic Assembly is known as SCARA. Except for the shoulder and elbow, rotational axes are vertical; this arrangement is comparable to the jointed-arm robot. This enables the robot to carry out vertical insertion duties (for assembly). These inspection robots are employed in pick-and-place, assembly, packaging, and dispensing.
4. Cartesian coordinate robot is also known as a gantry robot, rectilinear robot, or x–y–z robot. It consists of three orthogonal joints to achieve linear motions in a three-dimensional rectangular workspace. These robots are positioned to work over their workspace, saving floor space. Cartesian robot application includes pick and place, dispensing, assembly and inspection.
5. Three arms are linked to an above base to make up the delta robot. The delta robot moves small objects quickly, such as product packing. The food, pharmaceutical, and electronics industries all use these robots extensively.
The functioning of robots is further enhanced with the use of sensors, machine vision, and grippers. Each one of them facilitates different types of functions, which are:
Sensors in Robotics
Robotics uses a wide range of sensors to gather information from the production process for use in feedback control. To measure a physical stimulus or variable of interest (such as temperature, force, pressure, or displacement), a sensor translates the stimulus into a more usable form, typically an electrical quantity like voltage.
The different types of sensors are:
1. Advance sensors have considerably improved the robot’s scope; for example, tactile sensors are utilized to establish whether a sensor has made contact with another object.
2. Proximity sensors specify the proximity of an object to the sensor. Range sensors are the name given to this kind of sensor when it is used to show the actual distance to an object.
3. Optical sensors notice the existence or absence of objects and are often used for proximity detection.
Machine Vision
Like sensors, machine vision is used in robotics for inspection, parts identification, guidance, and other uses. Machine vision is being used as an integral component in many robot installations, especially in the automobile industry, thanks to advancements in the programming of vision-guided robot (VGR) systems. These advancements have made the adoption of this technology simpler and faster.
Grippers
During the work cycle, Grippers are end effectors (an end effector is often attached to the robot’s wrist) that are used to grip and manipulate items. The items are often working components that are moved about the cell from one place to another.
Robot Vision
Robot vision can be defined as the process of extracting, characterizing, and interpreting information from images of a three-dimensional world. A robot can respond to its environment intelligently and adaptably thanks to the advanced sensing system that vision provides.
Industrial robots may incorporate vision systems to improvise different sensor systems, which are:
1D Robotic Vision (Low-level vision): One-dimensional cameras are used to analyze the digital signal in this process. Usually, items made in a continuous process are subjected to surface inspection by robots equipped with 1D cameras.
2D Robotic Vision (Medium level vision): The most prevalent kind of robotic vision is systems. Views of things in both the X and Y planes can be obtained using 2D systems.
3D Robotic Vision (High-level vision): Systems give robots picture feedback on each object’s six degrees of freedom, simulating how an object would seem in real life. These vision systems can be used for welding, pick and place, part transfer, palletizing, and assembly.
Advantages of Industrial Robots are:
Improved quality and consistency: Better production quality, as well as more accurate and dependable operations, are made possible by industrial robots. Reduced cycle times and real-time monitoring to enhance preventative maintenance procedures are further advantages.
Maximum productivity and throughput: By working around the clock, an industrial robot speeds up manufacturing procedures. Breaks and shift changes are unnecessary for robots. In the end, cycle time is decreased, and throughput is increased thanks to the speed and dependability of robots.
Reduced direct labor costs: Many manufacturing tasks are more expensive to handle by a person than by a robot. This may allow employees to contribute their knowledge and abilities to other corporate endeavors.
Increased profitability: Integrating robotics ensures improved quality, consistency, maximum productivity, and throughput along with reduced labor costs which convert into a surge in profits.
Safety: Robots can perform repetitive activities more safely than humans, especially when manufacturing must be done in challenging environments. The Supervisors can keep a check on the procedure remotely or online.
Disadvantages of Industrial Robots are:
High CAPEX: Robots are frequently expensive to purchase, install, require additional components, and require programming to do the task.
Need Proficiency: The training and expertise to run an industrial robot need to be acquired from an automation company. The right automation team is crucial when integrating robots. Companies also require time to train their existing employees to program and interact with their new robotics system. Proficiency plays an essential role in industrial robotics.
Functional Limitations: Robots can only do what they are told to do – they can’t improvise independently. To complete tasks, they depend on their surrounding systems, such as vision systems, grippers, conveyors, and PLCs. They don’t have powerful brains as humans do; hence cannot compete with a human’s ability to understand what they can see.
Economic issue: The use of robots can create economic problems if they replace human jobs
Businesses across industries have progressed in automation by integrating robotics. The motivational factors and ROI justification for incorporating robotics are numerous. The key factors considered while robotics integration is:
Hazardous work for humans: Industrial robots should be considered for jobs when the conditions are hazardous, unsafe, unhealthy, uncomfortable, or otherwise unpleasant for people to do. Other jobs that are dangerous or unpleasant for people to perform besides die casting include spray painting, arc welding, and spot welding. In all of these procedures, industrial robots are used.
Repetitive work cycle: A repeated work cycle is one factor that encourages the usage of robotics. A robot can conduct the cycle more consistently and repeatably than a human worker if the order of motion elements is nearly identical.
Difficult Tasks: The task involving the handling of parts or tools that are heavy or otherwise difficult to manipulate can be performed by an industrial robot.
Multi-shift operation: Replacing a manual process with a robot offers a quicker financial payback than a single-shift operation; manual tasks may require second and third shifts. The robot replaces two or three workers rather than just one.
Infrequent changeovers: In most batch or job shop processes, the physical workspace must be changed from one job to the next. Because no parts are being produced during the changeover, the time spent is useless. Because changeovers are few in relatively lengthy production runs, robots have historically been simpler to justify.
Frequently Asked Questions
Q.1 How does a sluice gate control water flow?
A. A sluice gate controls water flow by using a movable barrier, typically made of metal or wood, that can be raised or lowered. When the gate is lowered, it obstructs the flow of water, allowing water levels to rise upstream. When the gate is raised, it allows water to flow freely, lowering water levels upstream. This simple mechanism regulates water flow in canals, rivers, and other water management systems.
Q.2 What are the benefits of using a mechanical bar screen in industrial processes?
A. Using a mechanical bar screen in industrial processes improves efficiency by removing debris, reduces maintenance needs, safeguards equipment, and contributes to cleaner water quality and a more sustainable environment.
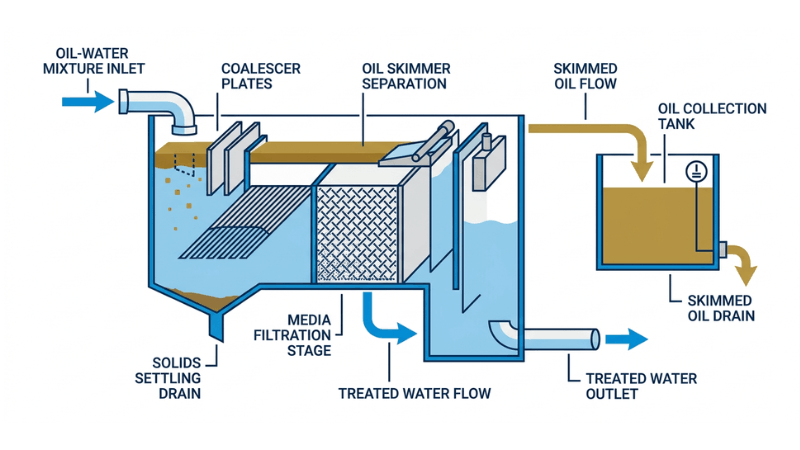
Q.3 What types of industries can benefit from using a belt oil skimmer?
A. Belt oil skimmers are versatile and beneficial for various industries such as manufacturing, metalworking, automotive, food processing, wastewater treatment, and marine, where removing oil, grease, and contaminants from water or other liquids is crucial for process efficiency, environmental compliance, and equipment maintenance.